Actuators, Free Full-Text
Par un écrivain mystérieux
Last updated 06 mai 2024
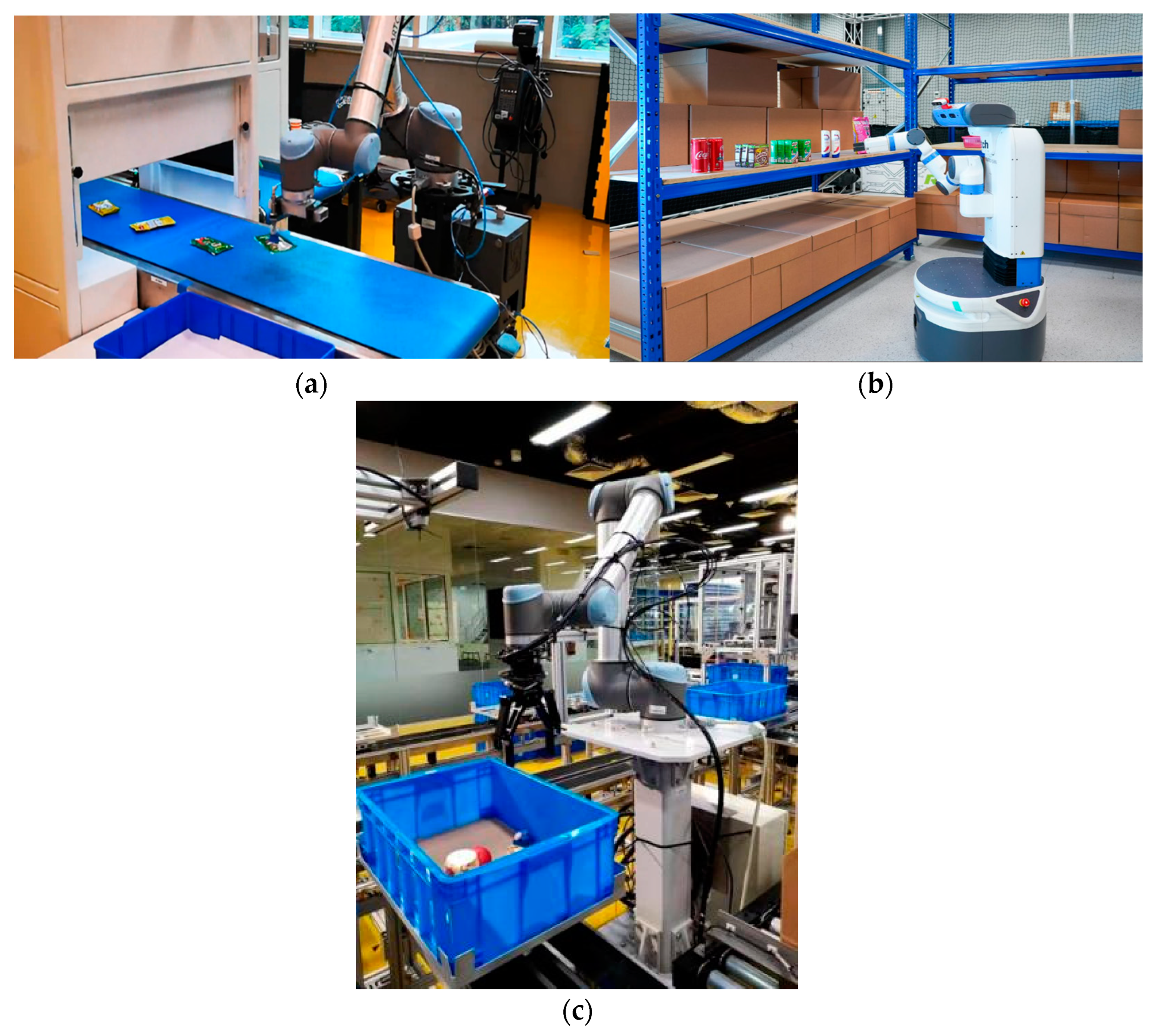
Industries such as the manufacturing or logistics industry need algorithms that are flexible to handle novel or unknown objects. Many current solutions in the market are unsuitable for grasping these objects in high-mix and low-volume scenarios. Finally, there are still gaps in terms of grasping accuracy and speed that we would like to address in this research. This project aims to improve the robotic grasping capability for novel objects with varying shapes and textures through the use of soft grippers and data-driven learning in a hyper-personalization line. A literature review was conducted to understand the tradeoffs between the deep reinforcement learning (DRL) approach and the deep learning (DL) approach. The DRL approach was found to be data-intensive, complex, and collision-prone. As a result, we opted for a data-driven approach, which to be more specific, is PointNet GPD in this project. In addition, a comprehensive market survey was performed on tactile sensors and soft grippers with consideration of factors such as price, sensitivity, simplicity, and modularity. Based on our study, we chose the Rochu two-fingered soft gripper with our customized force-sensing resistor (FSR) force sensors mounted on the fingertips due to its modularity and compatibility with tactile sensors. A software architecture was proposed, including a perception module, picking module, transfer module, and packing module. Finally, we conducted model training using a soft gripper configuration and evaluated grasping with various objects, such as fast-moving consumer goods (FMCG) products, fruits, and vegetables, which are unknown to the robot prior to grasping. The grasping accuracy was improved from 75% based on push and grasp to 80% based on PointNetGPD. This versatile grasping platform is independent of gripper configurations and robot models. Future works are proposed to further enhance tactile sensing and grasping stability.
Electric Actuators: Types, Applications, Benefits, and Design

Stimuli-Responsive Actuator Fabricated by Dynamic Asymmetric Femtosecond Bessel Beam for In Situ Particle and Cell Manipulation

Lead-free KNNLT piezoceramic multilayer actuators with Ni electrodes cofired under low oxygen partial pressure - ScienceDirect
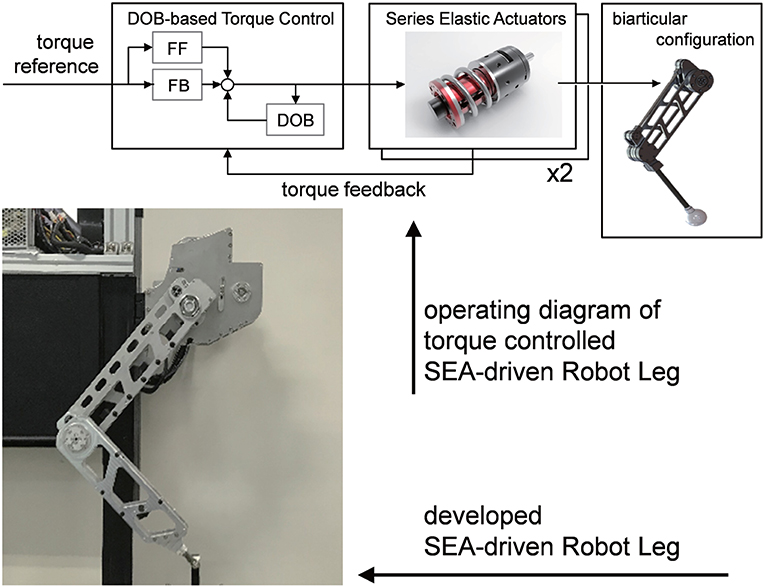
Frontiers Development, Analysis, and Control of Series Elastic Actuator-Driven Robot Leg

A dynamic electrically driven soft valve for control of soft hydraulic actuators

Full Closed Dust-Free Linear Actuators with Single Axis or Dual Axises for Solar Equipments Manufacturer - China Full Closed Linear Actuators, Single Axis Linear Actuators
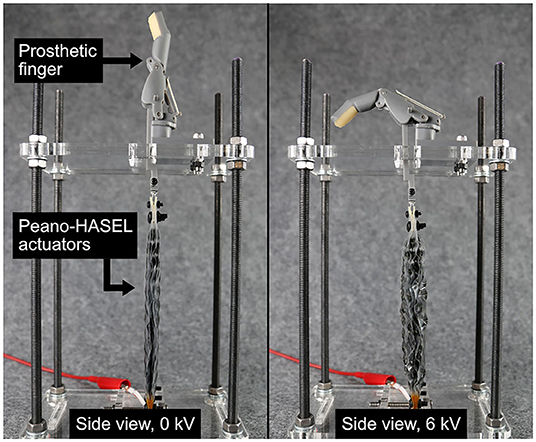
Frontiers Design of a High-Speed Prosthetic Finger Driven by Peano-HASEL Actuators

Proper Linear Actuator Testing Guide – Progressive Automations
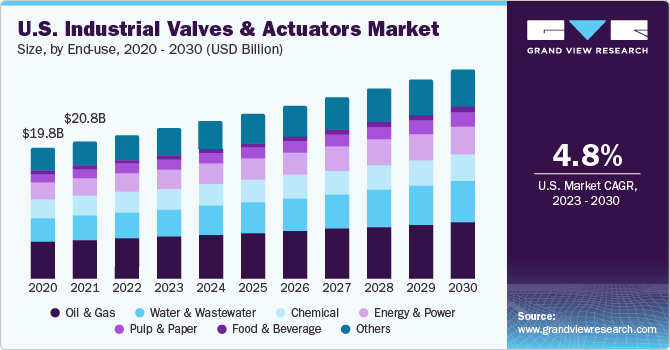
Industrial Valves And Actuators Market Size Report, 2030
Actuators, Free Full-Text
Recommandé pour vous
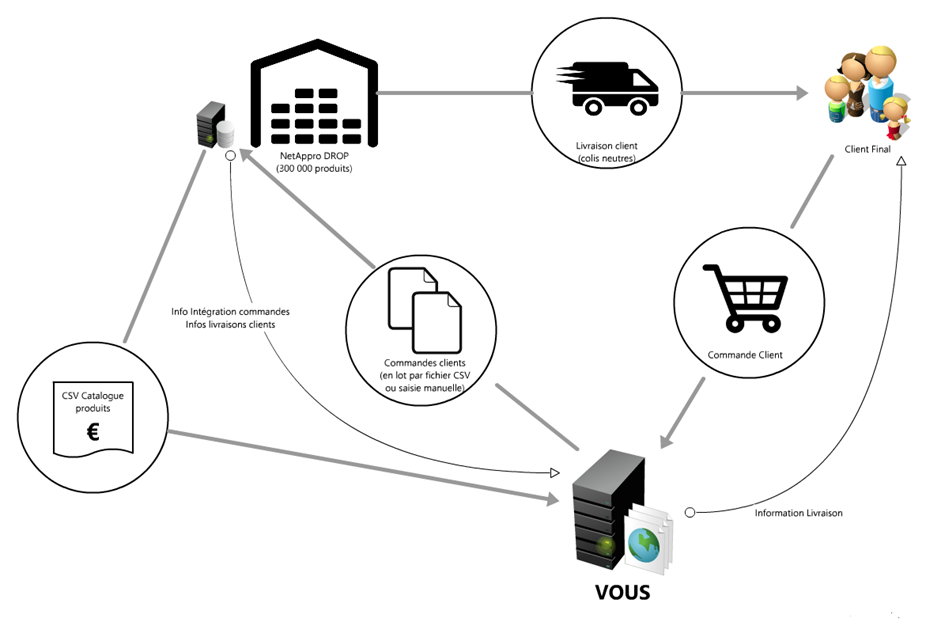 Grossiste en dropshipping marque blanche NetAppro Drop14 Jul 2023
Grossiste en dropshipping marque blanche NetAppro Drop14 Jul 2023 mix-slider Filtre anti-éclaboussures pour Thermomix TM6 TM5 TM31 : : Cuisine et Maison14 Jul 2023
mix-slider Filtre anti-éclaboussures pour Thermomix TM6 TM5 TM31 : : Cuisine et Maison14 Jul 2023 4 Pièces Mix-Slider Filtre Anti-éclaboussures pour Thermomix Accessoire Filtre de Rechange en Inox pour Thermomix TM6 TM5 TM31 : : Cuisine et maison14 Jul 2023
4 Pièces Mix-Slider Filtre Anti-éclaboussures pour Thermomix Accessoire Filtre de Rechange en Inox pour Thermomix TM6 TM5 TM31 : : Cuisine et maison14 Jul 2023 Arcturus Arcturus 2 Inch Filter Slide - Camera Concepts & Telescope Solutions14 Jul 2023
Arcturus Arcturus 2 Inch Filter Slide - Camera Concepts & Telescope Solutions14 Jul 2023 Cubes, Sliders and Rings14 Jul 2023
Cubes, Sliders and Rings14 Jul 2023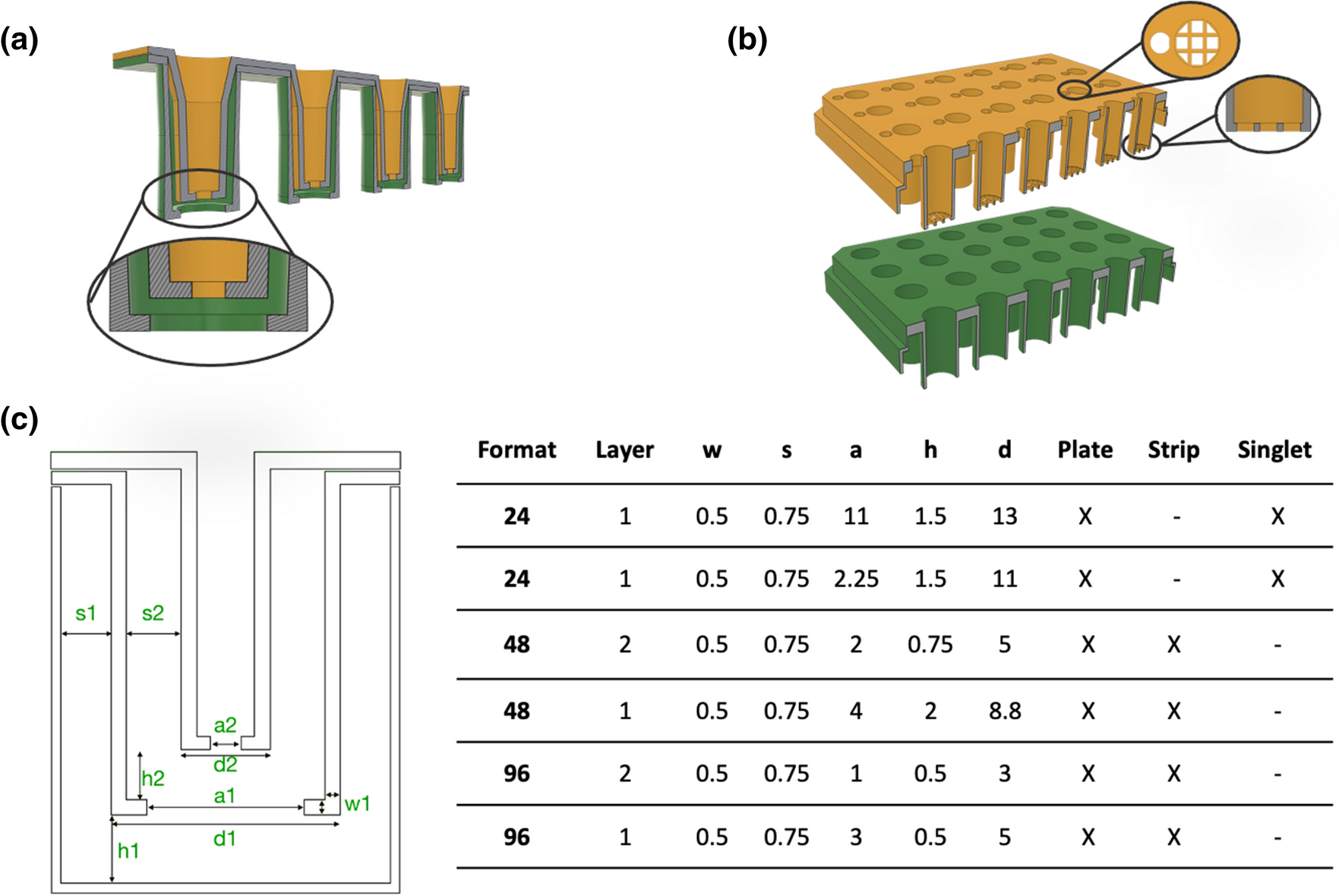 Customized 3D-printed stackable cell culture inserts tailored with bioactive membranes14 Jul 2023
Customized 3D-printed stackable cell culture inserts tailored with bioactive membranes14 Jul 2023 Filters / Slider14 Jul 2023
Filters / Slider14 Jul 2023 Millex pour solutions aqueuses - Filtres seringue - Filtration - Matériel de laboratoire14 Jul 2023
Millex pour solutions aqueuses - Filtres seringue - Filtration - Matériel de laboratoire14 Jul 2023- MBP Antibody, anti-human/mouse, REAfinity™, Recombinant antibodies, MACS Antibodies, Products and services14 Jul 2023
 T cells use distinct topographical and membrane receptor scanning strategies that individually coalesce during receptor recognition14 Jul 2023
T cells use distinct topographical and membrane receptor scanning strategies that individually coalesce during receptor recognition14 Jul 2023
Tu pourrais aussi aimer
 Chaussons pour Bébé Garçon 'Mickey' MICKEY - Gris clair - Kiabi14 Jul 2023
Chaussons pour Bébé Garçon 'Mickey' MICKEY - Gris clair - Kiabi14 Jul 2023 Gommes au vinaigre de cidre, Pomme naturelle, 1000 mg, 60 gommes14 Jul 2023
Gommes au vinaigre de cidre, Pomme naturelle, 1000 mg, 60 gommes14 Jul 2023 Imperméable SHEIN en polyuréthane pour fillettes avec volants et à double boutonnage rappelé en raison de la présence de plomb en concentration supérieure à la limite permise14 Jul 2023
Imperméable SHEIN en polyuréthane pour fillettes avec volants et à double boutonnage rappelé en raison de la présence de plomb en concentration supérieure à la limite permise14 Jul 2023 Shocker à impulsion électrique 5.500.000 Volts avec lampe LED14 Jul 2023
Shocker à impulsion électrique 5.500.000 Volts avec lampe LED14 Jul 2023 Carte pour localiser les sites à voir aux USA - Le blog USA de Dom14 Jul 2023
Carte pour localiser les sites à voir aux USA - Le blog USA de Dom14 Jul 2023 10 astuces pour organiser son bureau pour un travail efficace14 Jul 2023
10 astuces pour organiser son bureau pour un travail efficace14 Jul 2023/origin-imgresizer.eurosport.com/2021/01/14/2970974-60975408-2560-1440.jpg) Alpine affiche ses ambitions et veut régulièrement disputer les14 Jul 2023
Alpine affiche ses ambitions et veut régulièrement disputer les14 Jul 2023 Car Key Cover For Renault Abs Carbon Fiber Key Fob Cover Case For Renault Koleos 2017-2019 Kadjar 2016-2020 Megane 2016-2019 Keyless Entry Cover Case14 Jul 2023
Car Key Cover For Renault Abs Carbon Fiber Key Fob Cover Case For Renault Koleos 2017-2019 Kadjar 2016-2020 Megane 2016-2019 Keyless Entry Cover Case14 Jul 2023 Ensemble d'outils 555 pièces Brüder Mannesmann Vida XL 40859914 Jul 2023
Ensemble d'outils 555 pièces Brüder Mannesmann Vida XL 40859914 Jul 2023 Relaxdays Support mural, 24 cm de long, double crochet pour le mur14 Jul 2023
Relaxdays Support mural, 24 cm de long, double crochet pour le mur14 Jul 2023